Reliable frame-to-frame motion estimation for vehicle-mounted surround-view camera systems
Published in 2020 IEEE International conference on robotics and automation (ICRA), 2020
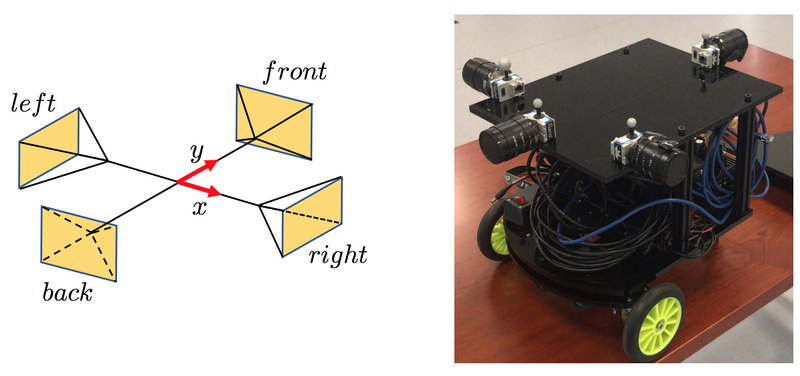
Abstract. Modern vehicles are often equipped with a surround-view multi-camera system. The current interest in autonomous driving invites the investigation of how to use such systems for a reliable estimation of relative vehicle displacement. Existing camera pose algorithms either work for a single camera, make overly simplified assumptions, are computationally expensive, or simply become degenerate under non-holonomic vehicle motion. In this paper, we introduce a new, reliable solution able to handle all kinds of relative displacements in the plane despite the possibly non-holonomic characteristics. We furthermore introduce a novel two-view optimization scheme which minimizes a geometrically relevant error without relying on 3D point related optimization variables. Our method leads to highly reliable and accurate frame-to-frame visual odometry with a full-size, vehicle-mounted surround-view camera system.
Reference:
- Wang, Y., Huang, K., Peng, X., Li, H. and Kneip, L., 2020, May. Reliable frame-to-frame motion estimation for vehicle-mounted surround-view camera systems. In 2020 IEEE International conference on robotics and automation (ICRA) (pp. 1660-1666). IEEE.